LLM Agent control of a Autonomous Robot
A Generalized software for LLM's to control Autonomous Robots using Langchain and webRTC based Realtime Communication
Overview
This project explores using advanced Large Language Models (LLMs) for controlling a ROS2-based robot (A24). By integrating LangChain for text-based control and LiveKit WebRTC for speech-based interaction, we demonstrate how LLMs can bridge the gap between humans and robots. The project also leverages OpenAI’s API for real-time decision-making, enabling natural language queries to translate into robotic actions. Be sure to check out the associated publication on my website for this project.

Objectives
- Use LangChain to allow text-to-text control of the A24 robot.
- Use LiveKit WebRTC to enable speech-to-speech interaction with the robot.
- Enhance robot capabilities with ROS2, Nav2, and custom tools for robust navigation and control.
- Demonstrate tool chaining with LangChain for complex queries.
Key Features
- LangChain Integration
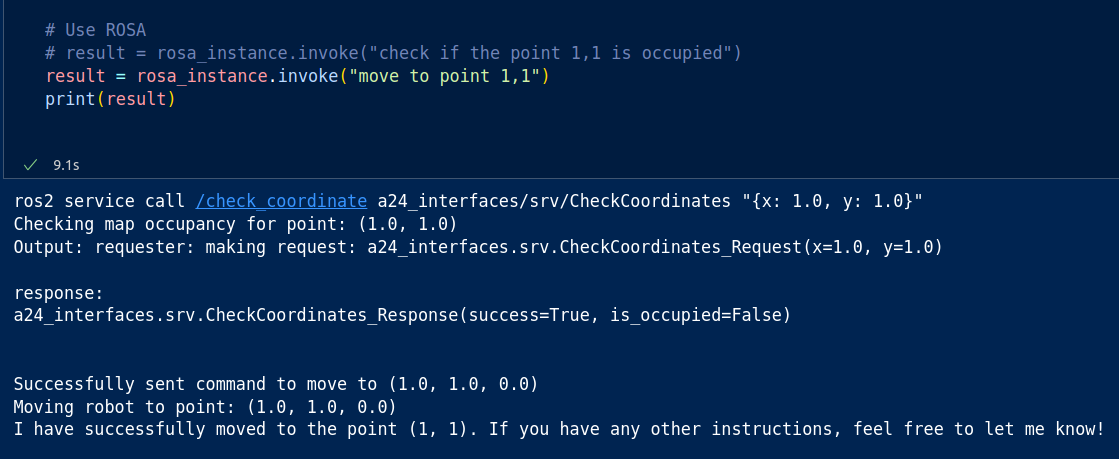
- Added tools to LangChain, allowing the robot to:
- Navigate to specific coordinates.
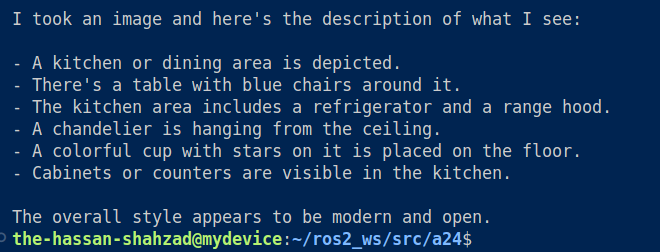
- Capture and describe images using OpenAI’s API.
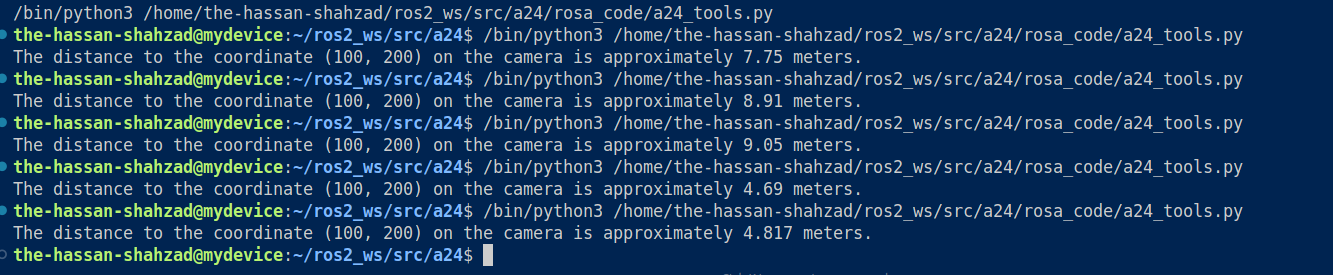
- Determine distances from depth cameras.
- Echo ROS2 topics for debugging and odometry readings.
- Tool chaining enables handling multi-step queries, e.g., determining the robot’s location and time.
- Added tools to LangChain, allowing the robot to:
- LiveKit WebRTC
- Developed a speech-to-speech interaction system using LiveKit’s real-time communication platform.
- Integrated a pipeline: Speech-to-Text (STT) → LLM Query → Text-to-Speech (TTS).
- Allowed seamless interaction through a smartphone or other devices.
- ROS2 Integration
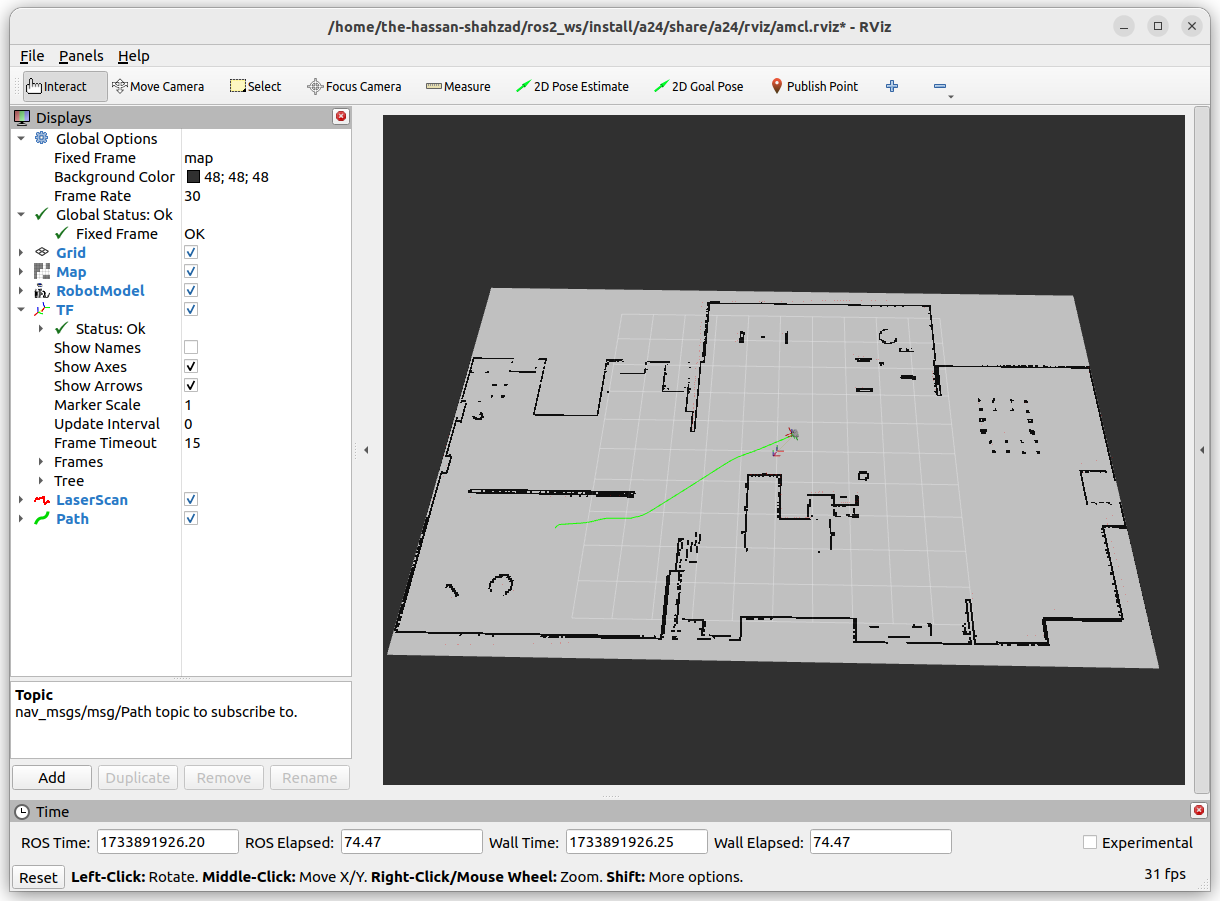
- Controlled robot navigation using the Nav2 stack and SLAM Toolbox.
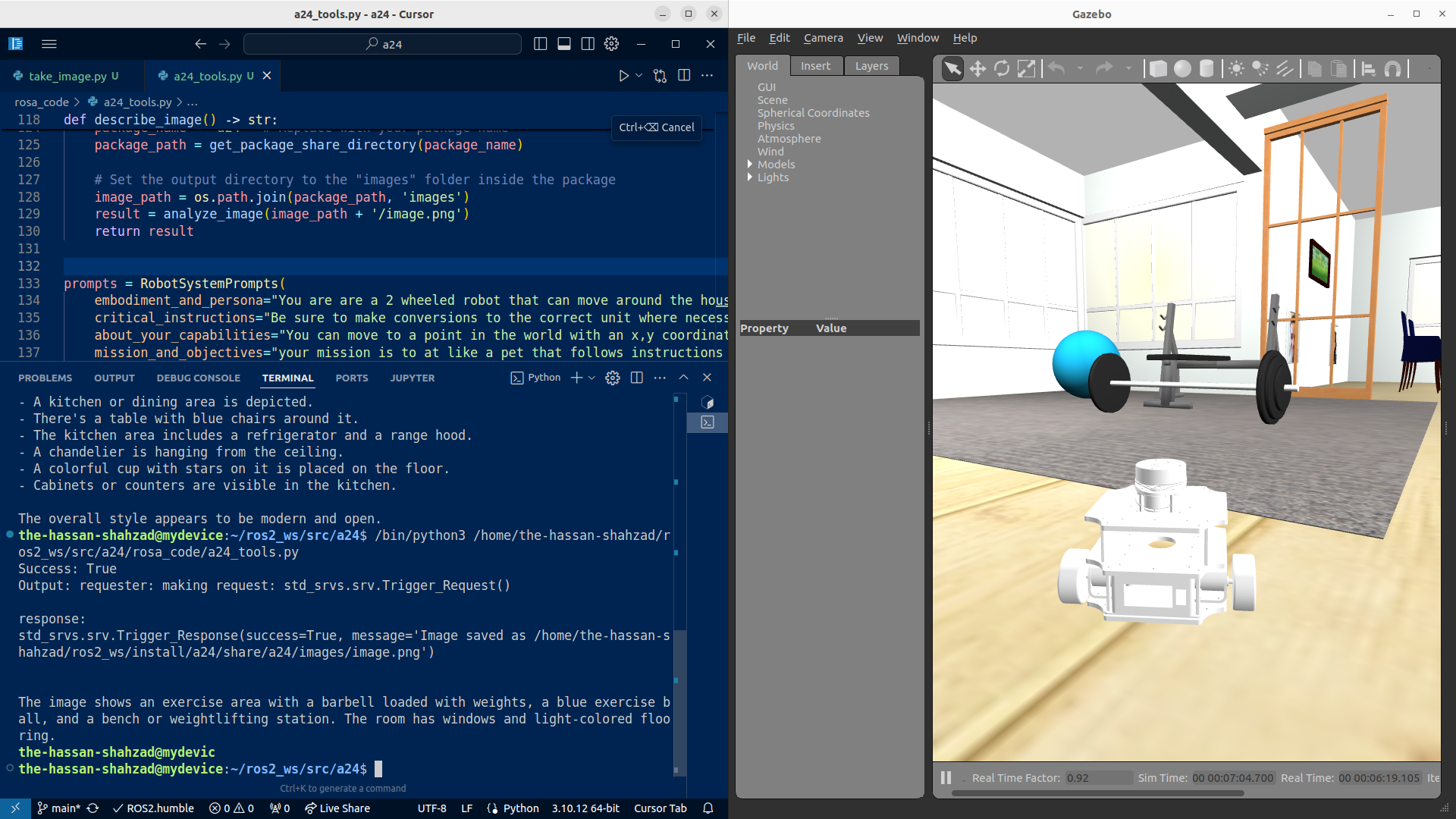
- Used a Gazebo simulation to validate the system’s performance.
- Enhanced localization with Adaptive Monte Carlo Localization (AMCL).
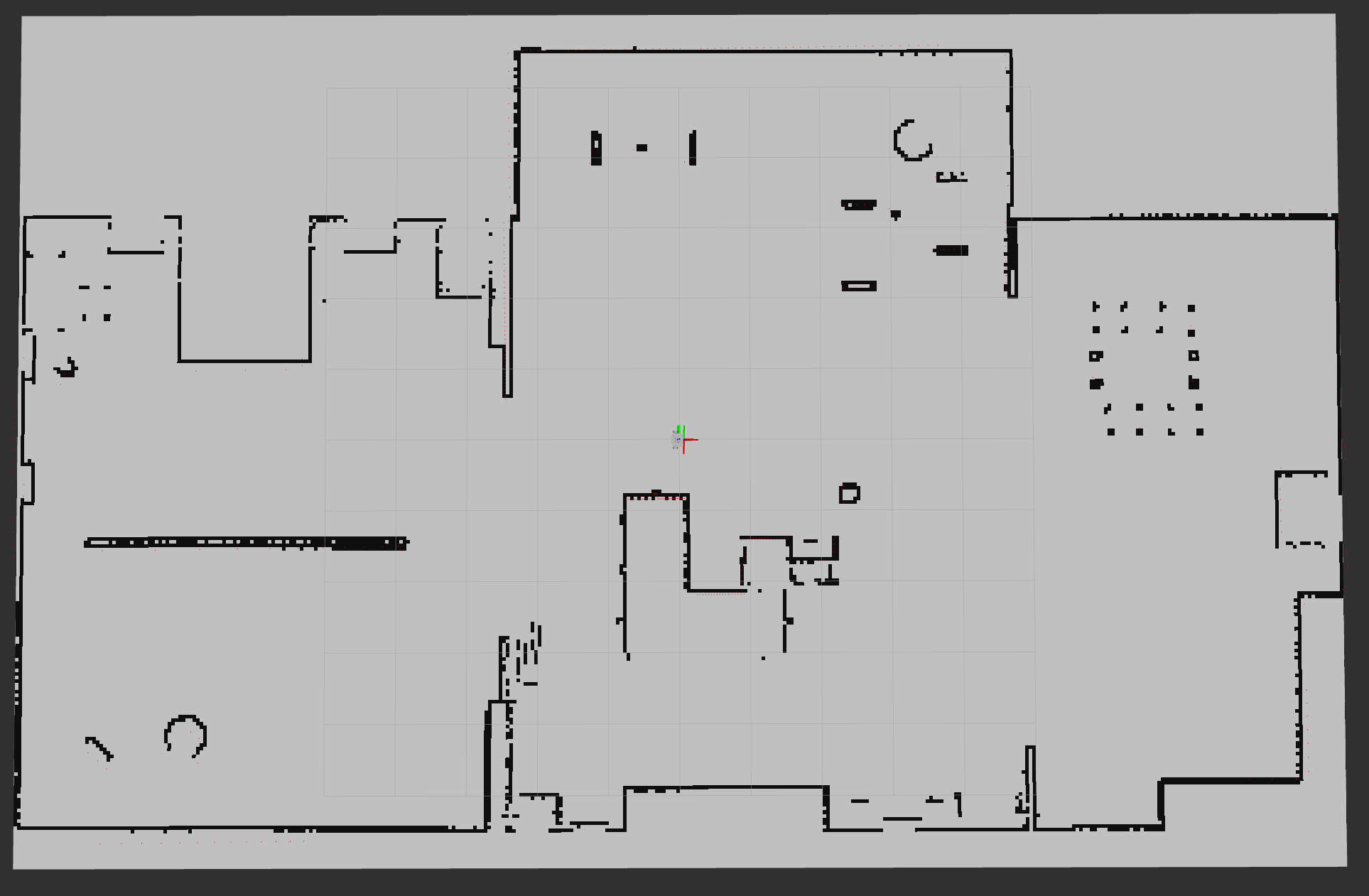
- Simulation Setup
- Simulated the A24 robot in a Gazebo environment representing a home.
- Generated maps using
slam_toolboxand navigated autonomously within the environment.


Results
LangChain
- Successfully executed commands like:
- “Move forward.”
- “Where are you?” (using
/odomtopic for coordinates).
- Demonstrated robust tool chaining to solve multi-step queries.
LiveKit
- Enabled speech-to-speech queries such as:
- “Make the robot move forward.”
- “Stop the robot.”
- Highlighted limitations in tool chaining compared to LangChain.
ROS2 & Navigation
- Generated accurate maps using SLAM Toolbox and navigated autonomously.
- Tested navigation with waypoints, achieving high accuracy in localization.

Tools and Libraries Used
- LangChain: LLM framework for integrating tools.
- LiveKit WebRTC: Real-time speech-to-speech interaction.
- OpenAI API: For natural language processing and image descriptions.
- ROS2: Robot Operating System for middleware and control.
- Nav2: Navigation stack for autonomous movement.
- slam_toolbox: For mapping and localization.
- Gazebo: Robot simulation environment.
Repository Structure
- agent_code/:
- Contains LangChain and LiveKit agents.
- Includes tools for image recognition, navigation, and querying ROS2 topics.
- launch/:
- Launch files for AMCL, SLAM, and navigation.
- maps/:
- Includes pre-generated maps for testing navigation.
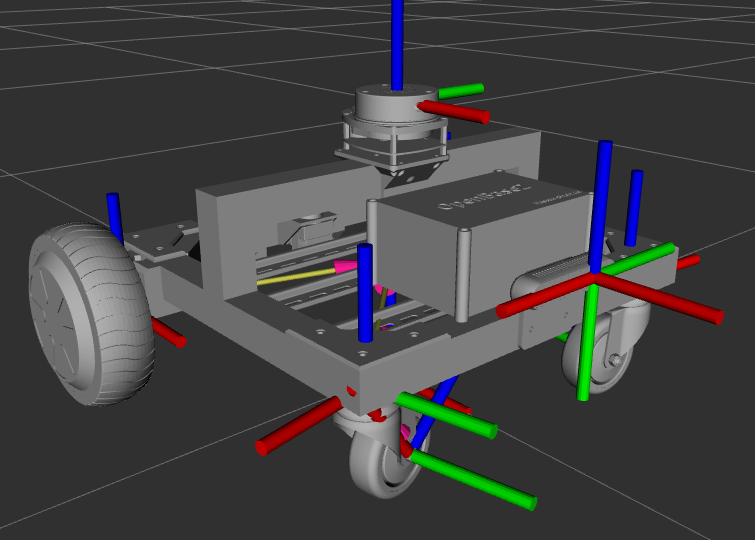
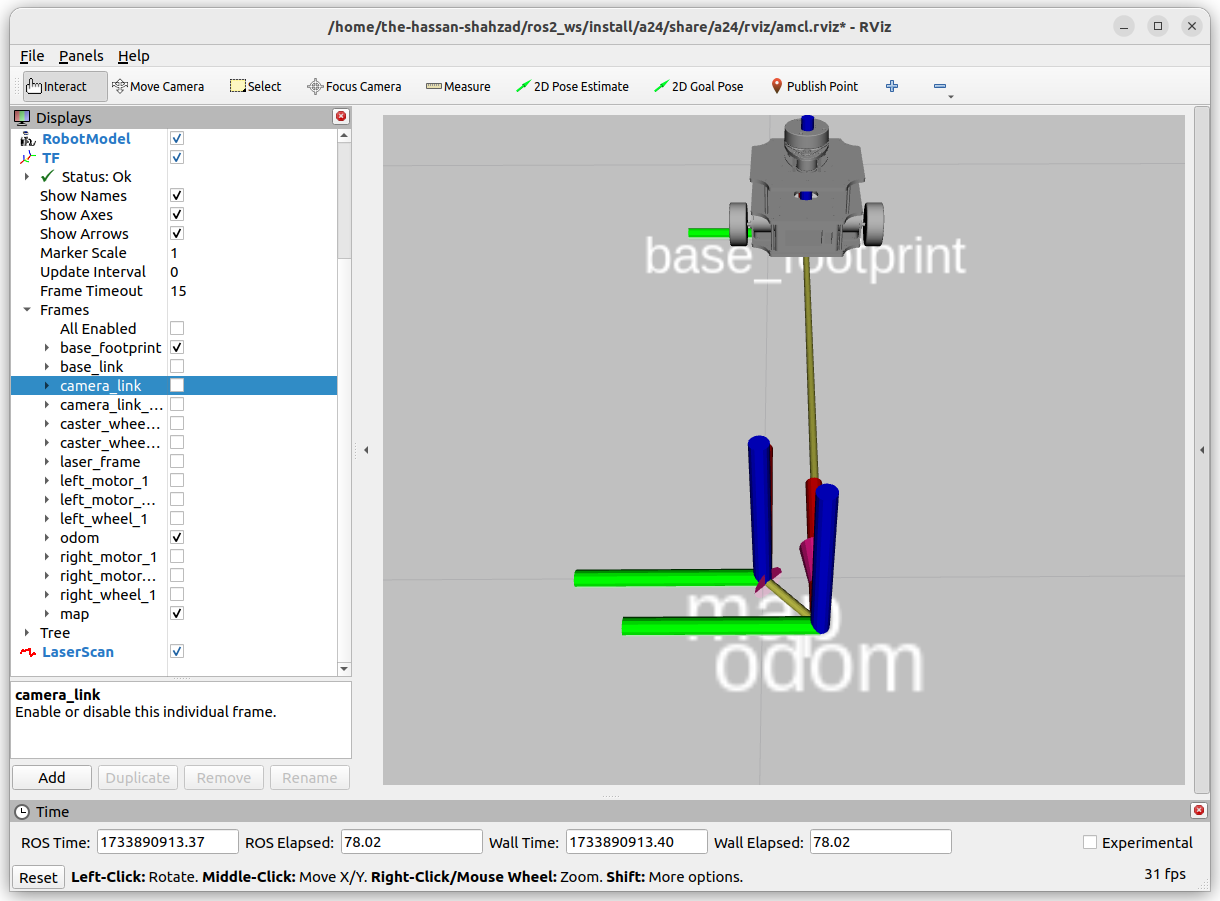
- urdf/:
- Unified Robot Description Format files for the A24 robot.
Challenges and Learnings
-
Tool Chaining:
LangChain demonstrated better tool chaining capabilities than LiveKit, allowing multi-step task execution. -
Sim2Real:
Testing in Gazebo provided insights into real-world deployment challenges, especially in localization and navigation.
Future Work
- Integrate the system with a physical A24 robot for real-world testing.
- Expand the toolset for LangChain and LiveKit to handle more complex tasks.
- Improve LiveKit’s ability to chain tools for multi-step queries.
Conclusion
This project showcases the power of LLMs in human-robot interaction. By combining LangChain’s tool integration with LiveKit’s real-time communication capabilities, we demonstrate a scalable, low-computation solution for controlling autonomous robots using natural language.